|
|||||
| Accueil | Produits | Services | Documentation | Références | Contact |
Le GM-METERUn système automatique de gestion de la stabilité
Le GM-METER est un indicateur automatique de GM complété d’un calculateur de stabilité, il peut ainsi apporter une réponse pratique et complète à la gestion de la stabilité des navires.
Le tout sans nécessiter la connaissance du chargement ni l’état des ballasts.
La stabilité est complètement définie (Voir La stabilité des navires) dés que l’on connaît : - Le tirant d’eau moyen - L’assiette - Le GM. - L’inclinaison d’équilibre du navire. - L’amplitude du roulis. - Le rapport des périodes des mouvements de roulis et de tangage. Le tirant d’eau et l’assiette du navire sont mesurés à l’aide d’installations classiques, et l’introduction de ces information dans le GM-METER peut être automatique par connexion aux installations de mesure ou par recopie manuelle. Les autres paramètres sont mesurés automatiquement par le GM-METER à l’aide de ses capteurs intégrés et celui-ci en déduit la conformité de la stabilité aux critères réglementaires, à l’état intact ou après avarie.
Comment fonctionne le GM-METER pour mesurer la stabilité statique :
La stabilité statique est complètement définie (Voir La stabilité des navires) par la connaissance du tirant d’eau moyen, de l’assiette, du GM, et de l’inclinaison d’équilibre du navire. Ces paramètres permettent de tracer la courbe des bras de levier de redressement ou courbe de stabilité du navire dans son état de chargement. La connaissance de cette courbe de stabilité permet de contrôler que les critères de stabilité réglementaires sont vérifiés. Tous ces calculs sont effectués automatiquement à partir des mesures.
La mesure du GM est le point essentiel de fonctionnement du GM-METER. Cette mesure est effectuée en appliquant la méthode préconisée par l’OMI pour la détermination du GM des navires inférieurs à 70 m de longueur qui est basée sur la mesure de la période de roulis du navire. Sur les grands navires il est difficile d’obtenir des roulis suffisamment important en eau calme pour effectuer une mesure à l’aide de moyens simple, aussi l’appareillage a été rendu suffisamment sensible pour réaliser cette mesure avec un roulis imperceptible. D’autre part, en mer, la houle peut perturber le mouvement du navire et fausser la mesure, aussi des moyens de filtrage ont été ajoutés pour permettre la mesure dans ces conditions. Enfin, à quai, la mesure est encore possible en corrigeant les résultats de l’influence hydrodynamique de la proximité du quai et de l’influence des amarres sur la période mesurée. La méthode de calcul pour passer de la période de roulis à la valeur du GM prend en compte les formes du navire et ne se contente pas de coefficients moyens suivant le type de navire, il est de plus tenu compte du chargement du navire à travers la mesure de ses tirants d’eau. Enfin la mesure a été rendue complètement automatique et est disponible immédiatement en temps réel. Avec ces améliorations, la mesure du GM est obtenue avec une précision de 10% ce qui a été jugé acceptable par les autorités qui ont déclaré l’usage du GM-METER conforme aux recommandations de l’OMI pour les navires à passagers, comme moyen de gestion de la stabilité. Il est a noter que la stabilité ainsi mesurée prend en compte tous les facteurs : carènes liquides, poids suspendus, communication avec la mer…et qu’il n’y a pas à effectuer de corrections.
Pour mesurer la période de roulis, le GM-METER utilise un capteur d’inclinaisons transversales qui fournit les inclinaisons de roulis de façon échantillonnées à une fréquence de 20 Hz. Ces valeurs échantillonnées sont traitées par analyse spectrale, ce qui permet d’obtenir la répartition dans l’échelle des périodes de l’énergie des mouvements transversaux. Le roulis est caractérisé dans ce spectre par une accumulation d’énergie dans une bande de période étroite. Les énergies dues à la houle ou aux vibrations et déformations du navire ont des signatures différentes et sont discriminées à l’aide d’un logiciel de reconnaissance de forme. L’avantage de cette méthode est la possibilité de discriminer la période naturelle de roulis des autres mouvements du navire. En effet, l’action de la houle, du mouvement d’oscillation du plan d’eau dans un bassin (sèche), même de période très proche de la période naturelle de roulis apparaissent de façon séparée et identifiable, et ne modifient pas la valeur de la période naturelle ainsi mesurée.
Cette inclinaison peut survenir à la mer à la suite d’un ripage de cargaison par exemple, aussi il est nécessaire de pouvoir la mesurer malgré les mouvements du navire sur la houle. Le navire roule autour de cette position d’équilibre, aussi le filtrage du mouvement de roulis, mesuré à l’aide d’un filtre de fréquence de coupure suffisamment basse, permet d’obtenir la composante continue, donc l’inclinaison statique. L’appareil utilise un filtre numérique fonctionnant sur une durée de mesure de deux à trois minutes et la mesure est rafraîchie toute les 10s environs. L’oscillation résiduelle sur la mesure est de 1/100 de l’amplitude du roulis, ce qui veut dire qu’avec un roulis de 10° d’amplitude (de chaque bord) la mesure d’inclinaison est effectuée avec une précision de 0,1°
Il est facile de comparer la valeur du GM mesurée aux valeurs admissibles en fonction du tirant d’eau et de l’assiette. On a ainsi le moyen de vérifier rapidement le respect des conditions qu’il est nécessaire de respecter à l’état intact pour satisfaire aux critères de stabilité avec l’avarie la plus contraignante. Avec les éléments hydrostatiques du navire en mémoire, il est aussi possible de calculer et de visualiser la courbe de stabilité déduite des valeurs du GM, du tirant d’eau et de l’assiette mesurés. On peut ainsi vérifier un à un les critères de stabilité en prenant en compte la gîte mesurée du navire.
Comment fonctionne le GM-METER pour assurer la surveillance de la stabilité instantanée sur houle :
Le GM-METER mesure et analyse les mouvements transversaux pour déterminer la période de roulis qui sert à calculer le GM. De la même façon, il mesure avec un capteur approprié, et analyse le mouvement de tangage du navire. Le roulis paramétrique qui est l’excitation du roulis par le tangage (Voir La stabilité des navires) peut survenir lorsque les deux mouvements sont au synchronisme ou à deux fois le synchronisme. D’autre part, par mer de l’arrière, on considère que le navire risque de se trouver trop longtemps au sommet d’une vague lorsque la période de rencontre atteint ou dépasse deux fois la période de roulis. Les deux spectres de ces mouvements, roulis et tangage, sont comparés. Une alarme est déclenchée si cette analyse révèle que les périodes de ces mouvements sont trop proches l’une de l’autre, ou trop proches du double ou de la moitié de l’autre. Le degré de proximité critique est modulé par la valeur mesurée de l’amplitude du roulis car le phénomène est d’autant plus dangereux que la houle est importante ou que son action s’est déjà initiée. Cette surveillance est effectuée en continue, avec une analyse toute les 10 s environ, ce qui permet au commandant de prendre toutes dispositions par modification de la vitesse ou du cap pour écarter le danger
Mesure de l’amplitude de roulis :
L’amplitude de roulis peut être définie de plusieurs manières suivant qu’elle est calculée par la mesure directe sur quelques mouvements ou par une méthode statistique sur une durée significative. Pour s’affranchir des fluctuations d’une oscillation à l’autre qui caractérisent les mouvements d’un navire à la mer, l’amplitude est mesurée par une méthode purement statistique : l’aire sous la courbe du spectre de mouvement qui est proportionnelle à l’amplitude significative du mouvement de roulis. La valeur ainsi calculée est de même nature, et peut ainsi être rapprochée pour une éventuelle corrélation avec la hauteur significative de la houle fournie par les organismes météorologiques. Il est utile de rappeler que lors d’une tempête type Mer du Nord, le plus fort coup de roulis qui sera rencontré aura une amplitude d’environ le double de l’amplitude significative.
La mesure, ou la détermination par le calcul, de la stabilité :
La mesure de la stabilité à l’aide du GM-METER ne rend pas inutile l’évaluation de la stabilité par le calcul. Le GM-METER permet, avec son module calculateur, l’évaluation par le calcul de la stabilité, aussi bien à l’état intact qu’après avarie. La comparaison du résultat d’un calcul classique de stabilité avec la mesure du GM-METER est très utile pour déceler les anomalies de chargement qui sont passés inaperçues et qui en s’accumulant peuvent dans certaines conditions créer une situation dangereuse. Il est recommandé d’effectuer de temps en temps cette comparaison qui pourra mettre en évidence des envahissements avec des carènes liquides passés inaperçus, des poids oubliés, des communications fortuites entre ballasts… Pour faciliter cette opération, le GM-METER est équipé d’un module de calcul classique de stabilité adapté au navire considéré. Ce module permet de saisir la description du chargement, l’état des capacités et éventuellement la présence d’une avarie. La comparaison entre la valeur mesurée et la valeur calculée du GM doit néanmoins être effectuée avec précaution. En effet, malgré la finesse du calcul effectué, la précision obtenue par le calcul est généralement moins bonne que celle donnée par la mesure : Les valeurs d’entrée décrivant le chargement sont souvent très approximatives, les documents hydrostatiques théoriques du navire peuvent être éloignés de la réalité de construction, et enfin le principe même du calcul induit une erreur relative importante sur le GM résultant, comme expliqué ci-après.
Le GM est calculé par GM = KM - KG
Or l’ordre de grandeur de KM et KG est d’environ 3 à 10 fois celui de GM. Il en résulte que des erreurs relatives modérées sur KM et KG se traduisent par une erreur relative importante sur GM lorsque celui-ci est de faible valeur. Ceci dit, la comparaison du GM mesuré et du GM calculé aide à maintenir à jour la connaissance de l’état du navire, ce qui conforte la sécurité.
Utilisation pratique du GM-METER, les simulations, la gestion des situations critiques :
Le GM-METER peut être utilisé de deux façons différentes : avant et au départ d’une part, en mer d’autre part. Le type de navire, et le genre d’exploitation feront que l’on utilisera plus l’une ou l’autre façon : Pour un ferry chargé en quelques dizaines de minutes et naviguant ensuite sur une très courte distance, on utilisera presque exclusivement la mesure au départ. Pour un porte-conteneurs qui doit optimiser son chargement, l’utilisation sera plutôt à quai avant le départ afin de ne pas laisser des boîtes qui auraient pu être embarquées. Pour un vraquier qui n’a théoriquement aucun problème de stabilité, la surveillance à la mer du GM permettra de déceler l’envahissement d’une cale qui peut entraîner une perte de stabilité fatale. Sur ces mêmes navires, on surveillera à la mer l’inclinaison due à un ripage de la cargaison, et la mesure de son influence sur la stabilité. Les navires de guerre aussi seront intéressés à suivre à la mer l’évolution de la stabilité après des avaries au combat. Le GM-METER mesure les éléments essentiels définissant la stabilité : GM et inclinaison d’équilibre. Il exploite ces éléments avec les valeurs du tirant d’eau moyen et de l’assiette qui lui sont fournis par des moyens extérieurs. A la mer, surtout si la houle est forte, il est difficile de mesurer ces deux dernières valeurs lorsqu’elles évoluent à la suite d’une avarie par exemple. Mais dans ce cas, des valeurs approximatives sont acceptables. En effet, pour un navire de 6m de tirant d’eau, une erreur de 0,50 m sur les tirants d’eau avant et arrière n’entraîne qu’une erreur de 3% sur la mesure du GM, ce qui est bien moins que les approximations des autres méthodes.
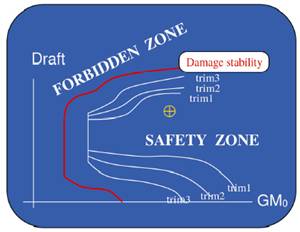
Pour permettre de saisir en un coup d’œil la situation de la stabilité, le GM-METER affiche le résultat du calcul de stabilité sous la forme d’un graphe : Dans le plan GM / Tirant d’eau moyen, les zones admissibles, et les zones interdites sont délimitées par des frontières pour plusieurs assiettes, et la stabilité du navire est visualisée par un point dont la trace marque l’évolution de la situation. Une frontière ultime après avarie peut compléter le graphique.
Cette représentation est particulièrement bien adaptée à un suivi de la situation à la mer en donnant la possibilité d’évaluer l’influence de l’imprécision de la mesure de tirant d’eau et d’assiette.
Un module de traitement permet d’effectuer des simulations de modifications de chargement et de prise en compte d’avaries. On pourra ainsi prévoir l'évolution à partir d'une situation mesurée, et en cas de situation critique tester les parades envisageables. L’intérêt de ce module par rapport à un calculateur de chargement classique, est qu’il donne directement, à partir d’une situation mesurée : GM, gîte, tirant d’eau et assiette, la situation attendue après l’application de l’avarie ou du mouvement de poids, sans pour cela nécessiter la connaissance du chargement du navire. Les seules données à saisir sont la description du mouvement de poids ou de l’avarie envisagée. Les situations étant superposables, on peut voir de la même façon quelle est l’effet d’une action de parade à une avarie virtuelle. Bien entendu, si l’avarie est réelle, toutes les parades envisagées peuvent être ainsi testées à partir de la situation mesurée instantanée. Ce module utilise la description du navire nécessaire au fonctionnement du module de calcul classique de stabilité, et prend en compte les moyens propres à la gestion des avaries comme les traverses d’équilibrage.
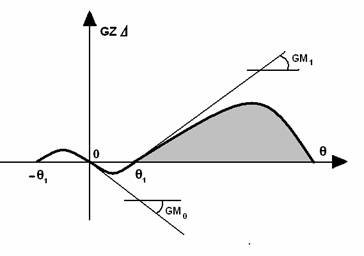
Le GM-METER est bien adapté à la gestion des situations critique, car ses indications traduisent toujours la situation réelle et non celle supposée par le bord. En particulier après avarie avec envahissement important, la stabilité mesurée tient compte de tous les facteurs influents : perte de stabilité par carène immergé, carène liquide, gîte, communication avec la mer… Si la situation évolue rapidement, le GM-METER permet de suivre cette évolution en temps réel, et sa fonction de simulation extrêmement rapide à mettre en œuvre aide à trouver la parade nécessaire. Une remarque tout de même : Le GM-METER ne mesure jamais de GM négatif. En effet, il est capable de mesurer un GM nul, car contrairement au résultat que suggère la solution simplifiée habituelle des équations du mouvement, la période de roulis est encore finie avec un GM nul. Il est aussi capable de déduire le GM0 à la position droite du GM1 mesuré avec une gîte statique due à l’application d’un moment inclinant. Par contre lorsque le GM est négatif et que le navire ne roule plus autour de la position droite, mais autour d’une position d’équilibre inclinée avec un GM apparent positif, le GM-METER n’est pas capable d’en déduire la valeur à l’origine qui a d’ailleurs peu d’intérêt si ce n’est qu’elle est négative (voir La stabilité des navires).
Bien qu’il ne mesure pas la véritable valeur du GM, le GM-METER, grâce à la mesure de la gîte à la position d’équilibre, calcul bien la courbe de stabilité résiduelle exacte, avec laquelle il effectue la vérification des critères. Le résultat est donc toujours conforme à la réalité, à part la valeur du GM et donc le critère de hauteur métacentrique minimum admissible qui peut être donné vérifiée à tord. C’est à l’utilisateur, alerté par l’inclinaison statique ne résultant pas d’un moment inclinant appliqué, à analyser la situation, ce qui est facile si lors des mesures précédentes les valeurs du GM étaient proches de zéro, ce qui l’induit à penser que le zéro a été franchi. Il peut aussi tout simplement visualiser la courbe de stabilité qui lui indiquera que le GZ s’annule pour l’inclinaison correspondant à la gîte mesurée. La fonction simulation pourra alors être utilisée pour trouver la meilleure façon de rétablir la situation.
Un système expert indique en fonction de la situation du navire après avarie les actions les plus efficaces pour rétablir une situation acceptable. Ce système est destiné à aider le Bord à prendre rapidement la bonne décision dans une situation critique. Il doit donc être appelé lorsque la mesure de la stabilité révèle une situation inacceptable ou proche de l’inacceptable. Le système indique les capacités sur lesquelles il est conseillé d’agir, par ordre de priorité et indique l'évolution de la situation au fur et à mesure de la simulation des actions préconisées. A chaque pas de calcul, deux situations sont affichées :
Si la simulation de la situation transitoire révèle une aggravation du danger (les carènes liquides en cours de transfert de fluide ont un effet négatif supérieur au gain créé par le mouvement de poids), il convient de séparer l’ensemble des actions en plusieurs étapes.
Les données nécessaires pour le paramétrage du GM-METER :
Le GM-METER a été conçu comme un outil d’exploitation du navire, aussi il n’exige pour son paramétrage, c'est-à-dire son adaptation à un navire, que les documents réglementaires qui doivent être disponibles à bord. En particulier, contrairement aux calculateurs de stabilité habituellement répandus qui sont en fait des outils d’architectures naval destinés à l’origine à l’élaboration des projets et aux calculs de ces documents, il ne demande pas la saisie géométrique fine de la carène ni les plans de compartimentage et de structure.
- Les caractéristiques générales du navire (Lpp, largeur, creux, déplacement et tirant d’eau en charge) - Le cahier des cas de chargement - Le procès verbal de l’expérience de stabilité - Une vue générale de profil et les plans des différents ponts (plan général) - Ces éléments sont complétés par nos propres mesures pendant l’expérience de stabilité, ou, pour les navires en exploitation, pendant un arrêt.
En plus des éléments ci-dessus : - Les courbes hydrostatiques : Déplacement, KM, LCF, KML, VCB, LCB en fonction du tirant d’eau, pour plusieurs assiettes. - les courbes pantocarènes pour différentes assiettes. - La liste des critères réglementaires de stabilité applicables. - Les GM ou KM admissibles en fonction du déplacement et de l’assiette et s’il y a lieu les GM ou KM ultimes après avarie. - le plan des capacités et leur destination. - Les tank curves. - L’indication des traverses éventuelles.
- Le plan de compartimentage. - L’équivalent des tank curves pour tous les compartiments. - Les coefficients de perméabilité pour chaque compartiment. Ces éléments sont suffisants pour établir le module de mesure de la stabilité instantanée sur houle ainsi que le module d'aide à la décision en cas d'avarie.
GM-METER : Présentation générale
|
![]()