|
|||||
| Accueil | Technique | Services | Documentation | Références | Contact |
L’expérience de stabilité
La hauteur du centre de gravité d’un navire est un paramètre important de la stabilité (voir La stabilité des navires). L’expérience de stabilité a pour but de déterminer la hauteur du centre de gravité du navire lège, à partir de laquelle en considérant les poids chargés, on pourra déterminer la hauteur du centre de gravité général du navire. La mesure passe par la mesure fine du GM du navire et la détermination de la position de M par les formes
KG = KM – GM
Les formes du navire étant connues, KM est connu pour chaque flottaison. L’expérience de stabilité est donc composée de : - Mesure des tirants d’eau - Mesure du GM
La mesure du GM passe par un test d’inclinaison.
Test d’inclinaison :
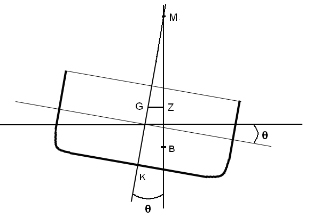
Le navire est incliné par déplacement d’un poids p d’une distance transversale l. Si l’inclinaison θ est suffisamment petite (inférieure à 3°) le point métacentrique M1 reste confondu avec le point métacentrique initial M (Voir la stabilité des navires). Avec Δ le déplacement du navire, on a l'égalité des moments inclinant et de redressement :
Pour que la mesure soit précise, il convient d’identifier toutes les sources d’erreur, de les évaluer et de minimiser les plus importantes.
Minimisation des erreurs systématiques :
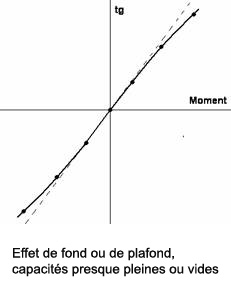
L’utilisation de la formule (1) suppose que le seul moment inclinant provient du déplacement de poids. La mesure sera faussée si un moment parasite vient s’ajouter ou se retrancher au moment inclinant du au poids. Ceci peut être le cas avec un vent constant agissant sur le navire, ou une amarre mal placée qui exerce une force de rappel à la gîte. Ce moment parasite peut aussi résulter de la présence d’importantes carènes liquides à bord. C’est l’effet de plafond avec des cuves presque pleines ou des raidisseurs et des anguillets avec des cuves presque vides.
Ces biais sont mis en évidence en effectuant plusieurs mesures avec des moments inclinant différents :
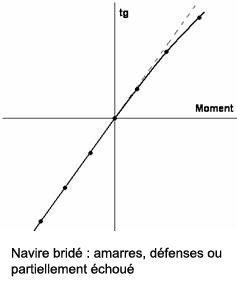
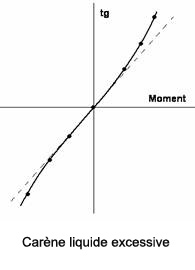
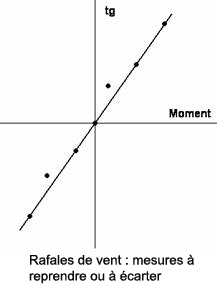
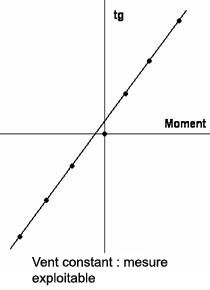
La formule (1) s’écrit : tg θ = p l / Δ GM
Dans le plan (tg θ , p l ) les points de mesure doivent être alignés sur une droite de pente 1 / Δ GM Si les points ne sont pas disposés sur une droite, mais suivant deux segments correspondant aux inclinaisons sur un bord et l’autre, cela désigne l’action d’une amarre malencontreuse ou la présence de carènes liquides importantes. Si les points sont alignés sur une droite ne passant pas par l’origine, cela désigne l’action d’un vent traversier constant. Si enfin certains points sont manifestement en dehors de tout alignement possible, cela désigne un incident sur ces mesures (saute de vent, erreur de lecture, contact intermittent avec le quai…), et ces mesures sont à écarter.
L’étude de la droite de mesure permet de s’assurer qu’il n’y a pas de biais systématique, et d’éliminer les mesures suspectes. On verra plus loin que les biais subsistants peuvent être éliminés en traçant la droite de mesure avec une régression par la méthode des moindres carrés.
Procédures de mesure :
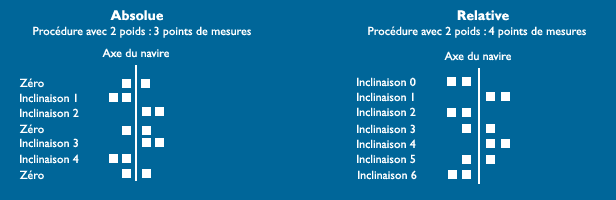
Aucun moyen de mesure des inclinaisons ne permet de mesurer l’angle d’inclinaison de façon absolue. En effet, le zéro des systèmes de mesure est généralement la verticale (pour le pendule ou l’horizontale pour un tube en U), ou est tout à fait arbitraire (niveau à bulle ou inclinomètre électrique). Il est donc nécessaire de déterminer l’origine des mesures. Si cette origine correspond à la position du navire sans moment appliqué, et est commune à toutes les mesures (zéro des mesures), la procédure sera par abus de langage une procédure absolue.
La formule (1) étant valable dans toute l’étendue d’inclinaison proche du navire droit (+/- 3°), l’angle θ peut être l’angle entre deux inclinaisons quelconques de cette étendue d’inclinaison. La mesure peut donc être effectuée entre l’inclinaison appliquée au navire et l’inclinaison de la mesure précédente à condition que (p l) désigne le déplacement de poids entre ces deux positions. On a alors une procédure relative.
Dans cette procédure, le zéro ou mesure de la position d’origine doit être effectué avec le plus grand soin puisque son résultat va influer sur toutes les autres mesures : une erreur de lecture sur le zéro introduit un biais sur toutes les autres mesures. Même si la mesure du zéro est effectuée avec soin, une erreur peut être introduite par variation physique de la position d’origine. L’établissement d’un vent constant en cours de mesure, l’ensoleillement qui déforme le navire, la variation d’assiette due à l’inclinaison transversale, la déformation du support du système de mesure, sont des phénomènes qui vont modifier le zéro. Si l’expérience est longue, on peut minimiser ces effets en effectuant plusieurs zéros avec en particulier un zéro en début et un autre en fin d’expérience. On pourra alors soit prendre comme origine la moyenne de ces zéro, soit affecter un zéro particulier à un groupe de mesures. Les moments inclinant considérés sont ceux qui font passer de la position d’origine à l’angle d’inclinaison mesuré.
Dans la procédure relative, le zéro de chaque mesure est constitué par la mesure précédente. L’intérêt est évident : il n’y a plus de biais général introduit par une imprécision sur le zéro, et d’autre part, la mesure d’inclinaison étant, dans le temps, au plus proche du zéro, on minimise les dérives éventuelles du zéro. D’autre part, une perte éventuelle du zéro générale (par déplacement accidentel du système de mesure par exemple) n’est plus ici une cause de reprise complète des mesures. Enfin les mesures peuvent être effectuées d’un bord sur l’autre ce qui en augmente l’amplitude et réduit l’erreur relative résultante ; le moment correspondant est celui qui fait passer d’une inclinaison à l’autre.
Ces avantages sont obtenus au prix d’une plus grande complexité de procédure. Il faut bien établir à l’avance cette procédure si on veut pouvoir tracer une droite de mesure avec des points régulièrement répartis, en évitant les doublons ou les manques sur un bord ou l’autre.
Exemples de procédures
Précision des mesures :
Les biais éventuels ayant été minimisés, et les mesures aberrantes étant éliminés par le choix de la procédure et le tracé de la droite de mesure, la formule (1) permet d’établir les sources d’imprécisions. Pour une grande partie des mesures on peut atteindre assez facilement une précision de 1/1000
L’imprécision sur les poids inclinant n’est fonction que du soin de l’opérateur qui veillera à rester dans une précision de l’ordre de 1/1000 en utilisant un matériel de pesage adapté.
La mesure d’une distance de déplacement, même avec des moyens de chantier, peut être obtenue sur plusieurs mètres avec une précision meilleure que 1/1000. L’incertitude provient plutôt de la détermination du centre de gravité des masses déplacées, surtout si ces masses ont des formes compliquées ou sont très divisées (gueuses à main). On s’affranchi de l’incertitude sur la position des centres de gravité en remarquant que le déplacement (l) du centre de gravité est le déplacement de n’importe quel point d’une masse si celle-ci est déplacée parallèlement à elle-même. Cette remarque permet d’effectuer des mesures avec des masses (remorque chargée par exemple) dont la position du centre de gravité est inconnue.
Toutes les autres mesures étant effectuées avec des précisions de l’ordre de 1/1000, sans biais, donc se compensant au moins partiellement, la précision totale sera en fait donnée par la précision sur la mesure des inclinaisons et celle du déplacement, moins bonnes que cela en général.
La précision des inclinaisons est limitée par la précision de la lecture du système de mesure qui sera limitée elle même par les dimensions du système si c’est un système mécanique (7 m pour un pendule pour qu’il reste rectiligne, la largeur du navire pour un tube en U). A ces limitations il faut ajouter les imprécisions propres aux systèmes : mesure de la longueur du pendule, appréciation de sa position moyenne d’équilibre, ménisques dans un tube… L’intervention d’un opérateur pour la lecture annihile la possibilité d’améliorer la précision par relectures multiples à moins de multiplier les opérateurs et de les faire travailler en aveugles. On peut aussi multiplier le nombre de pendules pour augmenter le nombre de mesures, en prenant soin d’opérer avec des pendules de longueurs différentes pour éviter que les opérateurs ne s’influencent. Le gain est néanmoins en grande partie illusoire car on multiplie aussi les sources d’erreur et les risques d’incident.
Le déplacement d’un pendule ou la variation de niveau dans un tube en U ne peuvent être appréciés avec une précision meilleure que 1 mm à chaque extrémité ce qui donne pour des déplacements de l’ordre de 150 mm une précision moins bonne que 1%. Cette précision est encore dégradée par l’appréciation d’une position d’équilibre fluctuante.
L’ensemble de ces considérations limite la précision de mesure des inclinaisons par un moyen mécanique à 2%, ce qui est d’autant plus regrettable que les moyens de mesure d’angle sur chantier permettent jusqu’à des précisions 100 fois meilleures.
Obtenir une précision proche de 1/1000 sur le déplacement est loin d’être évident si on considère que pour un navire de 10 000 t de 150 m de long le volume de carène croit de l’ordre de 25 m³ par centimètre d’enfoncement, donc 2,5/1000. La précision nécessaire sur la lecture des tirants d’eau serait donc de ± 0,5 cm, ce qui est déjà souvent meilleur que la précision de traçage des échelles de tirant d’eau. L’attention se portera aussi sur les courbes hydrostatiques quelques fois établies hors membres donc pour lesquelles il faut ajouter l’influence du bordé.
La mesure de la densité ω doit être aussi effectuée avec précaution : Utiliser un densimètre d’assez grande dimension pour que la lecture donne au moins le 1/1000 malgré l’influence des ménisques. Prendre en compte l’influence de la température si la densité est mesurée après coup sur un échantillon, enfin, prendre garde à l’hétérogénéité de ω des eaux qui baignent le navire dans un estuaire. Il n’est pas rare en effet dans ce cas, de voir la densité varier de 1.003 en surface à 1.020 à une profondeur égale au tirant d’eau.
Toutes ces sources d’imprécision font que le déplacement sera connu généralement avec une précision plus proche du 1/100 que du 1/1000, et donc tous les efforts que l’on fera pour améliorer cette précision influeront directement la précision du résultat final.
Quelques conseils généraux pour améliorer la précision :
Une bonne évaluation de la précision des mesures est le calcul de l’écart type relatif de ces mesures que l’on effectuera sur les valeurs du GM calculées pour chaque inclinaison Xi.
On sera étonné de voir que cette valeur caractérisant la dispersion des résultats est souvent plus proche de 10 % que de 2%
L’utilisation de la méthode de la droite de régression par les moindres carrés permet d’améliorer notablement cette dispersion et donc la précision en éliminant les biais: Le tracé de la droite de résultats dans le plan (tg θ , p l ), comme vu plus haut, permet déjà de déceler les anomalies de mesure. Pour améliorer la précision, on calcule la droite de régression donc la droite qui ne passe pas par les points de mesure, mais qui passe au plus prés de tous les points (origine comprise) par la méthode des moindres carrés :
C’est la droite telle que la somme des carrés des distances des points de mesure à cette droite soit minimum, donc qui minimise la moyenne des carrés des écarts des mesures
Cette droite a pour équation Mt = A0 tgθ + A1 avec Mt = p l A0 et A1 sont les solutions du système (avec n inclinaisons) :
Une fois les mesures suspectes écartées, la pente de la droite qui passe ainsi au plus prés de tous les points, fournit la valeur du Module de stabilité initiale : Δ GM = A0 et donc la hauteur métacentrique GM. Si la droite ne passe pas par l’origine, c’est qu’un moment parasite, créé par un vent constant par exemple, biaise les mesures (A1 ≠ 0). Le résultat final A0 = Δ GM est indépendant de ce biais.
Sans calculateur pour résoudre ce système, on pourra faire l’approximation suivante : On ne considère que les valeurs absolues (ce qui revient à faire la moyenne entre les résultats des deux bords), et on impose à la droite de mesure (moyenne des deux bords) de passer par l’origine. On a alors A1 = 0 et donc : A0 = Δ GM = Σ Mt / Σ tgθ
Cette méthode est moins bonne que la détermination complète de la droite de régression, mais elle a l’avantage d’être très simple et donne une meilleure précision que la moyenne des GM calculés pour chaque inclinaison qui fait d’ailleurs la même hypothèse de passage par l’origine. L’utilisation de la méthode complète en éliminant le biais sur les mesures permet de diminuer notablement l’imprécision du résultat en appliquant la formule (2) aux distances des points de mesure à la droite.
Comme autres conseils pour améliorer les résultats, on peut citer, en contradiction avec quelques règlements, ou habitudes de certains opérateurs : - Lorsque le vent appuie le navire contre les défenses de quai, il est préférable d’effectuer les mesures d’inclinaison dans cette position plutôt que d’écarter le navire du quai pour effectuer la mesure pendant qu’il dérive librement. En effet dans les deux cas se superpose au moment inclinant appliqué, un moment parasite. Lorsque le navire dérive, ce moment est formé de la force du vent et de la résistance de dérive alors que contre le quai c’est un couple composé de la même force du vent et de la réaction des défenses. Dans ce dernier cas le bras de levier est plus faible, les défenses étant placées plus haut que le centre de dérive, et les forces sont plus stables alors qu’elles peuvent varier avec la vitesse de dérive. Le moment parasite étant éliminé en utilisant la droite de régression on effectuera avantageusement la mesure sans bouger le navire et donc en lui évitant des mouvements désordonnés.
- Lorsque l’on utilise un pendule pour la mesure des inclinaisons, comme instrument principal ou en vérification d’un système plus élaboré, on prendra les précautions suivantes : . Pour que le pendule ait une longueur bien fixe, mesurable au 1/1000, on utilisera un fil souple, celui-ci sera suspendu par serrage entre deux cales de bois à l’aide d’un serre-joint. De cette façon le point de rotation sera bien défini, alors que l’utilisation d’un anneau d’accrochage laisse une ambiguïté de quelques millimètres sur la position de ce point. . Si la position d’équilibre du pendule est évaluée en effectuant la moyenne entre deux positions extrêmes, il est impératif que ces extrêmes soient consécutifs. Le résultat final sera la moyenne de ces moyennes partielles. . En aucun cas les élongations ne seront mesurées après coup par marquage in situ sur une bande de papier, la dilatation du papier avec les variations du taux d’humidité pouvant atteindre 5 % .
Conclusion :
En effectuant les mesures avec le plus de soins possibles, l’imprécision sur la mesure du GM sera proche de la somme des imprécisions sur les mesures d’inclinaison et celle du déplacement. Si on utilise un moyen de mesure mécanique des inclinaisons, et les échelles de tirant d’eau pour évaluer le déplacement, la précision générale des mesures sera au mieux de 3 %.
Le seul moyen d’améliorer la précision sur la mesure du GM est d’améliorer la précision de la mesure des inclinaisons et des tirants d’eau, ce qui passe par l’utilisation de moyens plus sophistiqués que les systèmes mécaniques. Le GM-METER TEST3 a vocation d’être le système de référence pour ces mesures puisqu’il permet d’atteindre des précisions bien meilleures que ces valeurs en améliorant la précision de mesure des inclinaisons et celles des tirants d’eau.
|
![]()